今回のコラムでは、モータ制御基板に置けるノイズ発生原理と、ノイズの対策方法を紹介します。
>>当社の「モータ制御基板 設計・開発サービス」はこちら!
モータドライバによるノイズ
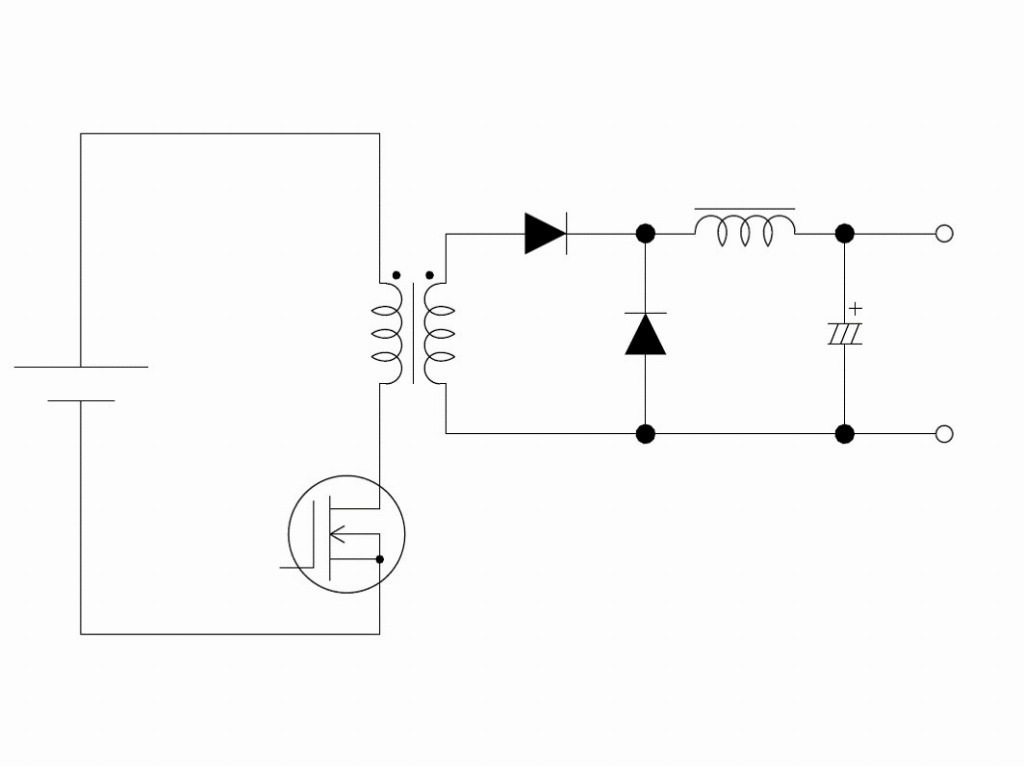
モータ制御基板はノイズを発生させやすい基板であり、その要因はモータドライバにあります。モータドライバがノイズを発生させる理由として、以下があります。
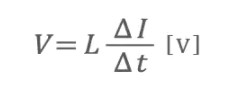
電力の切り替え
モータードライバは、モーターに電力を供給するためにスイッチング動作を行います。このスイッチングにより、電流や電圧が急激に変化する場合があり、急激な電流変化はインダクタンスや容量に起因するノイズを発生させ、周囲の回路に影響を及ぼします。
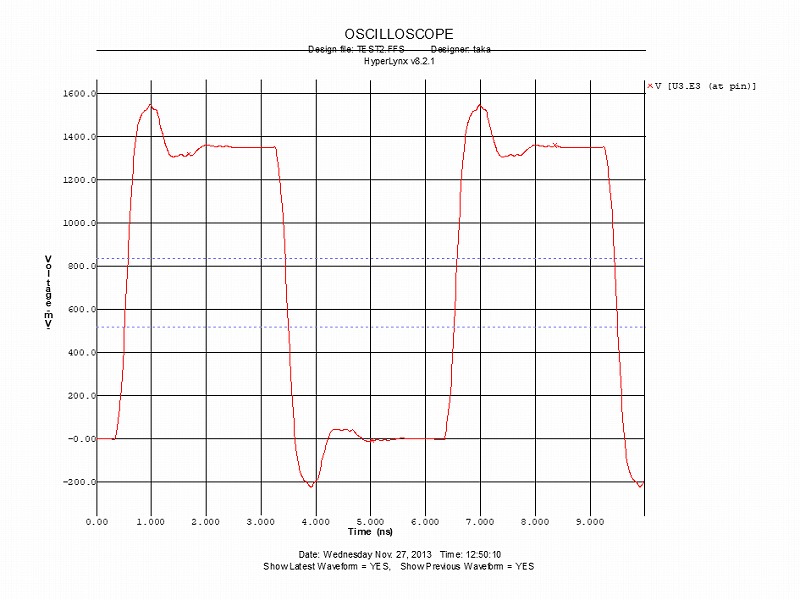
PWM信号の要因
モータードライバはパルス幅変調(PWM)信号を使用してモーターの速度や回転方向を制御します。PWM信号はデジタル的なオン・オフの切り替えであり、スイッチングノイズを引き起こすことがあります。また、高いスイッチング周波数を使用する場合、ノイズが発生しやすくなります。
モータドライバはノイズの影響も受けやすい
モータードライバは、モーターの正確な制御を担う重要な役割を果たしています。ただ、モータードライバーはモーターによるノイズを受けやすく、そのノイズにより安定した動作と信号伝達を妨げる可能性があります。
また、モーターが高速で回転する場合や大電流が流れる場合には、より多くの電磁干渉が生じる可能性があります。この電磁干渉は、近くの回路や配線に影響を及ぼし、ノイズを発生させます。
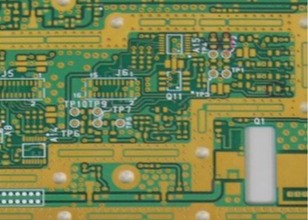
モータ制御基板で行うノイズ対策
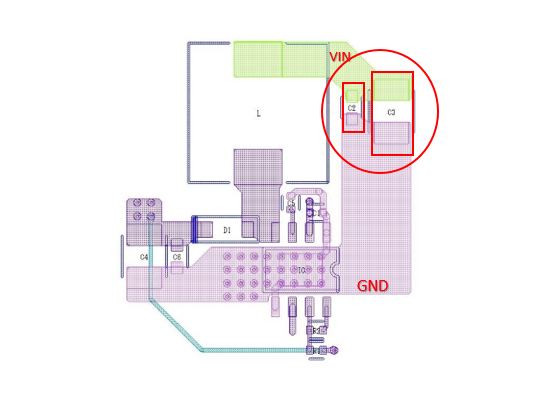
モータ制御基板のノイズ対策は、グランド設計、ノイズフィルターをはじめとした部品の最適配置、電源ライン・制御ラインのセパレートが重要となります。
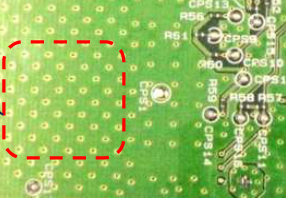
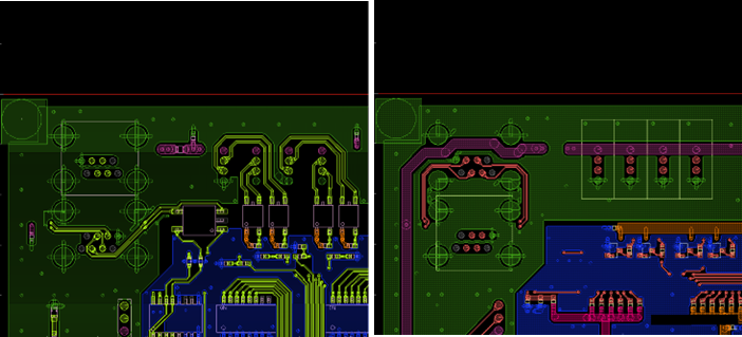
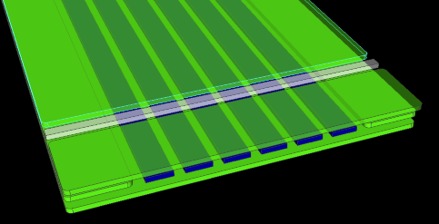
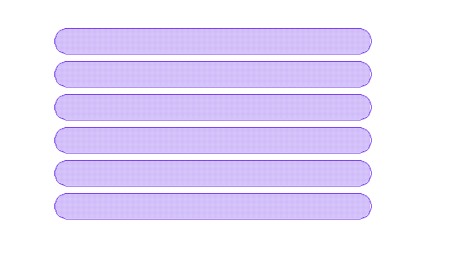
PWM制御信号はGNDガードをする。
Before
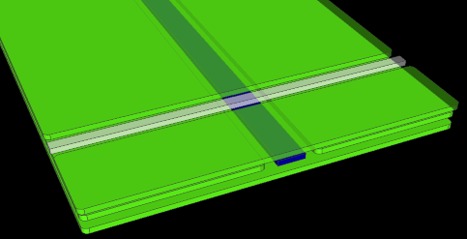
PWM制御信号はノイズを受けてしまうと、誤動作につながりモータドライバーをコントロールすることができなくなります。
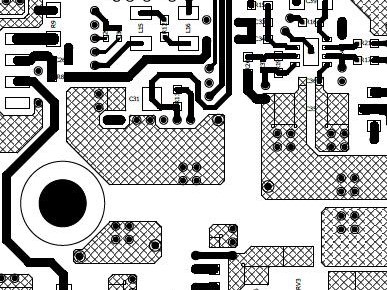
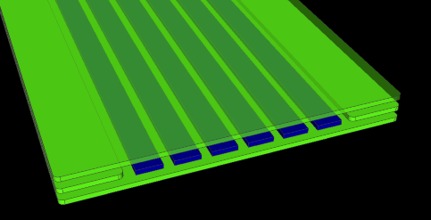
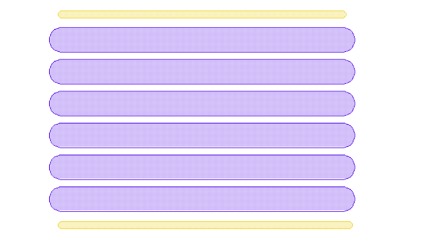
After
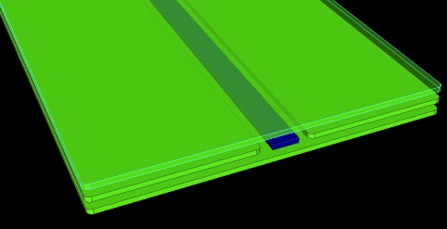
PWM制御信号はノイズの影響を受けないようにGNDガードをする必要があります。
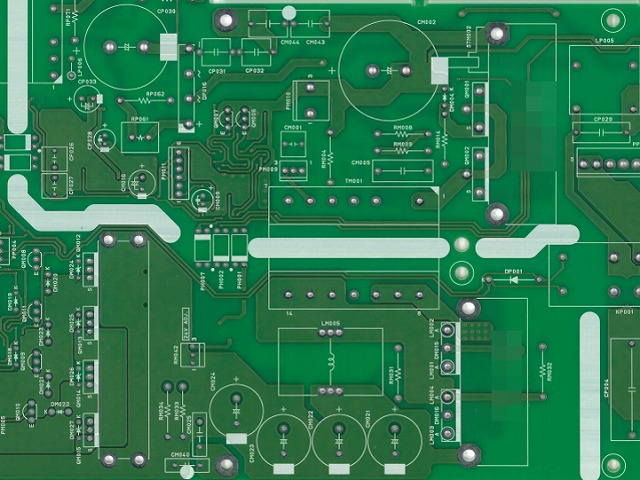
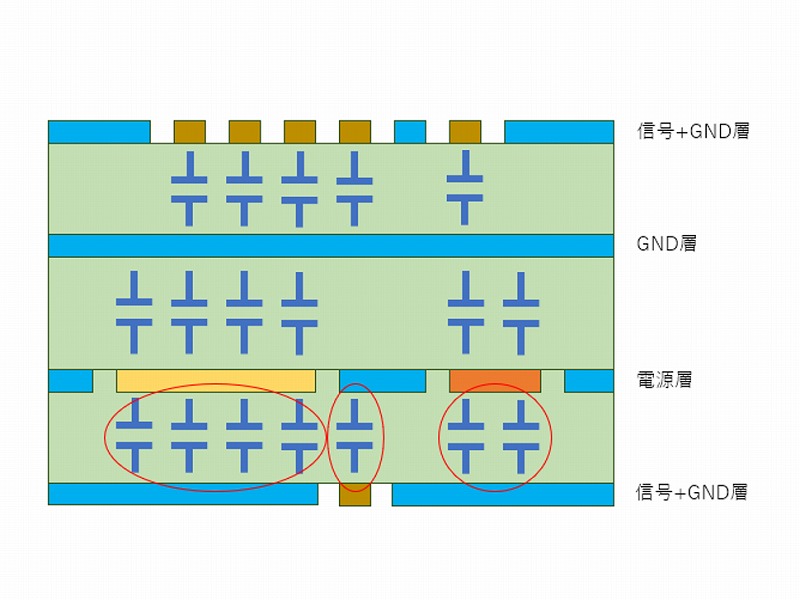
モータドライバーのGNDガードは上下層もGNDにする
Before
モータドライバーの配線とその他の信号線や電源が層間で重なっていると、干渉してしまい、ノイズの影響を受けてしまったり、影響を与えてしてしまうことで動作が不安定になってしまいます。
After
モータドライバーの配線は、近くの回路や配線にノイズの影響をおよばさないように、上下層もGNDでガードすると事で安定した動作をさせる事ができます。
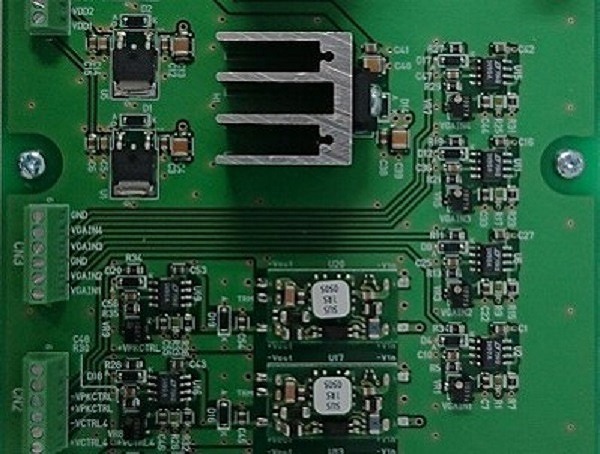
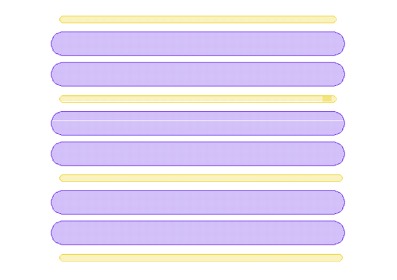
モータドライバーの配線はまとめる
Before
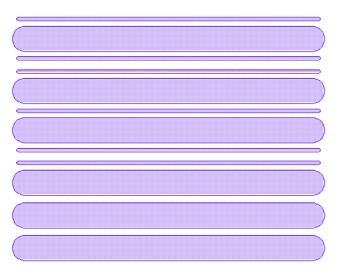
モータドライバーの配線がバラバラだと、近くの信号へノイズが伝搬してしまい誤動作の原因となります。
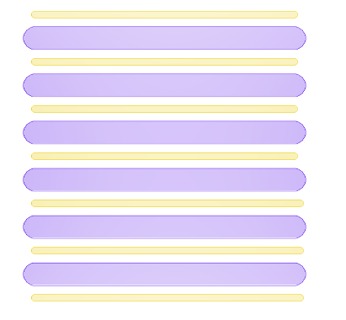
After
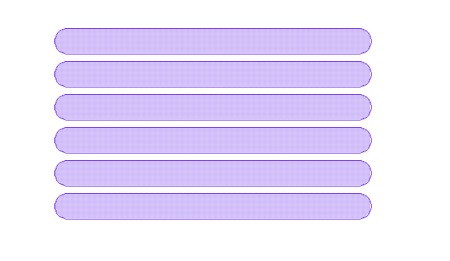
モータドライバーの配線は、まとめて配線することにより、他の信号との干渉をさせないようにします。また、モータドライバーの配線は+-をペアで引く必要があります。
モータドライバーの配線はGNDガードをする
Before
モータドライバーの配線は、まとめるだけでは不十分です。さらにGNDのガード処理を行う必要があります。
After Case①
モータドライバーの配線はまとめて配線することにより他の信号との干渉をさせないようにします。また、モータドライバーの配線は+-をペアで引く必要があります。
After Case②
モータドライバーの配線は+-ペアでGNDガードをするとCase①よりノイズの低減ができます。基板設計で配線の密度によりケース①、②を使い分けます。
After Case③
モータドライバーの配線は、配線スペースに余裕があれば、1本1本GNDガードをすることでノイズの低減をすることができます。
ハンドブックのダウンロードが可能!
以下のハンドブックダウンロードが可能です、是非ご確認下さい。
↓モータードライバ基板 ガード処理の方法↓